~95%
Cube solving accuracy using the C++ algorithm
2-axis
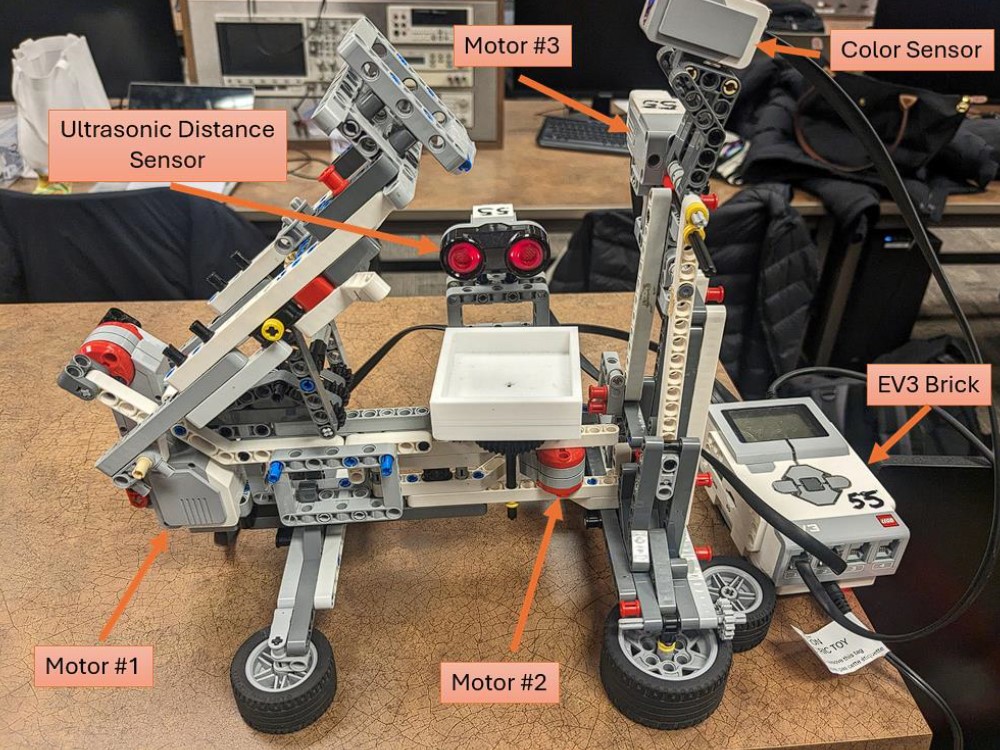
Independent rotation via Lego Mindstorms motors
Solved
Validated from any cube state in under 2 minutes
Overview
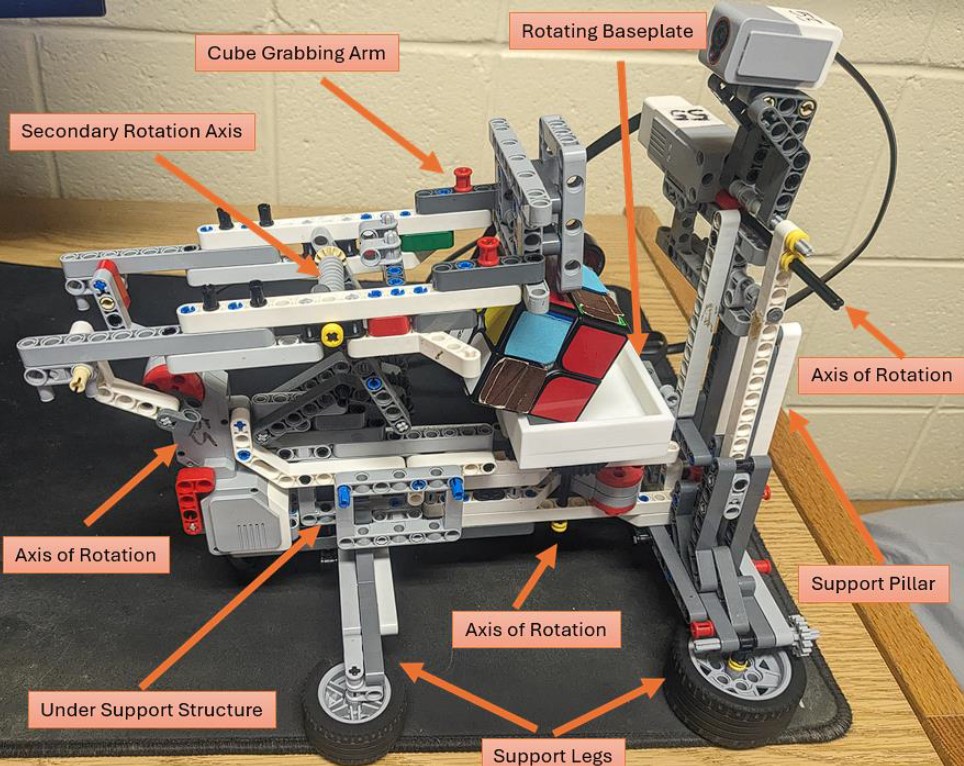
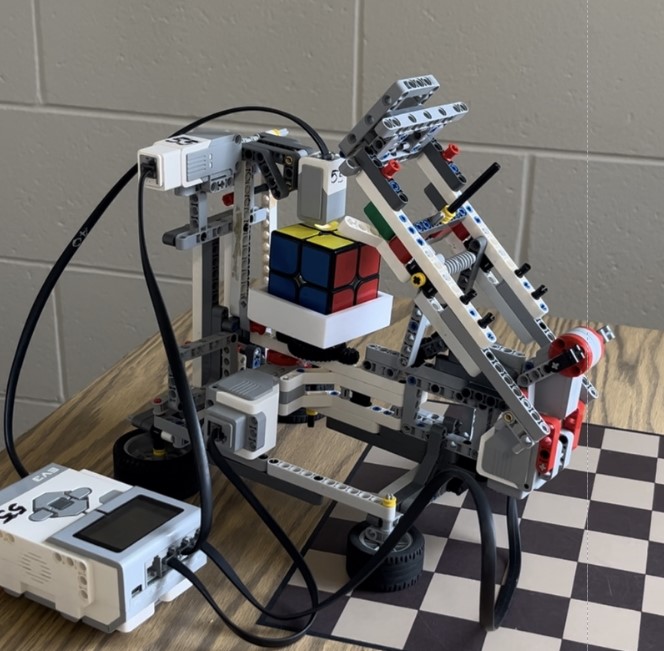
- Lego Mindstorms robot designed to solve a 2x2 Rubik's Cube from any scrambled configuration
- Fabricated parts designed in SolidWorks to support cube grabbing, rotation, and repositioning
- Solving time minimized while maintaining 100% accuracy across all tested states
Engineering
- Full robot modeled in SolidWorks — cube grabbing arm, rotating baseplate, and secondary rotation axis integrated into a single assembly
- C++ algorithm integrated via RobotC to calculate and execute the solution sequence for each unique cube configuration
- Mechanical axes of rotation validated to ensure reliable cube handling across all solve attempts
Outcome
- Cube solver achieving ~95% accuracy using optimized C++ algorithm
- Start-to-finish solve time reduced to under 2 minutes
- Demonstrated successful interplay between mechanical design and software-driven motion control